HydroNet







HydroNet
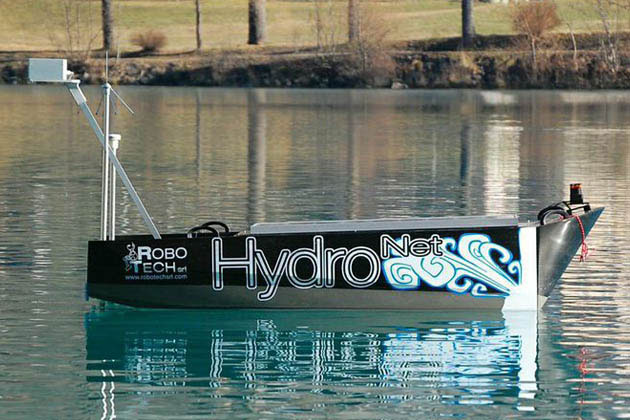
Already available today as a tool for research, Hydronet is a service robot for monitoring the water in rivers, lakes and coastal areas. Able to navigate autonomously following a pre-programmed routes, it is equipped with a water-sampling system and sensors for analysing the following parameters: temperature, pH, salinity, turbidity, dissolved oxygen, hydrocarbons dissolved in water and hydrocarbons on the surface.
1400 METRES TRAVELLED IN 45 MINUTES FOR ACQUISITION AND ANALYSIS OF WATER SAMPLES.
150 DATA ITEMS ON THE PRESENCE OF HYDROCARBONS ON THE SURFACE AND MORE THAN 250 DATA ITEMS CONCERNING THE PHYSICAL PROPERTIES OF WATER. THESE ARE JUST SOME OF THE STATISTICS FROM THE MISSION IN SUMMER 2014 AT THE WRECK OF THE COSTA CONCORDIA.
More
July 2014. One week before the controversial wreck of the Costa Concordia was recovered, ROBOTECH carried out an experimental, data monitoring mission at the Isola del Giglio, around the wreck, using the HydroNet. The mission was carried out in conjunction with the Scuola Superiore Sant’Anna and ISPRA (the Italian governmental institute for environmental protection and research) , in agreement with the institutions and operators responsible for the salvage.
For this special mission the HydroNet robot was equipped with a probe for monitoring the physical parameters of the water (turbidity, conductivity, pH, dissolved oxygen, redox and nitrates), a sensor for detecting hydrocarbons on the surface and a sensor for detecting hydrocarbons dissolved in the water, taken at a depth of about 30cm. The robot was also equipped with a pump to take and store samples of the surface water.
For this mission, HydroNet was programmed to navigate along a route designed to reach three sampling and monitoring points located fore and aft of the Concordia, at a distance of about 25 metres from the wreck.
At the sampling and monitoring points the robot analysed in real time the presence of hydrocarbons dissolved in the water and took a sample of about 2 litres for subsequent analysis in the laboratory. The robot also continuously analysed the presence of surface hydrocarbons throughout the navigation, and the physical properties of the water, using the probe.
In order not to hinder the salvage operations, HydroNet was programmed to navigate around the ship at a distance of about 150 metres, just making quick incursions to reach each of the sampling and monitoring points. The total journey – about 1400 m – was covered in approximately 45 minutes (including time for taking water samples), at an average speed of 2 knots.
For this special mission the HydroNet robot was equipped with a probe for monitoring the physical parameters of the water (turbidity, conductivity, pH, dissolved oxygen, redox and nitrates), a sensor for detecting hydrocarbons on the surface and a sensor for detecting hydrocarbons dissolved in the water, taken at a depth of about 30cm. The robot was also equipped with a pump to take and store samples of the surface water.
For this mission, HydroNet was programmed to navigate along a route designed to reach three sampling and monitoring points located fore and aft of the Concordia, at a distance of about 25 metres from the wreck.
At the sampling and monitoring points the robot analysed in real time the presence of hydrocarbons dissolved in the water and took a sample of about 2 litres for subsequent analysis in the laboratory. The robot also continuously analysed the presence of surface hydrocarbons throughout the navigation, and the physical properties of the water, using the probe.
In order not to hinder the salvage operations, HydroNet was programmed to navigate around the ship at a distance of about 150 metres, just making quick incursions to reach each of the sampling and monitoring points. The total journey – about 1400 m – was covered in approximately 45 minutes (including time for taking water samples), at an average speed of 2 knots.